Objectif : Rťaliser le schťma cinťmatique du systŤme avec Open Mťca et l'animer.
Objectif : Rťaliser le schťma cinťmatique du systŤme avec Open Mťca et l'animer.
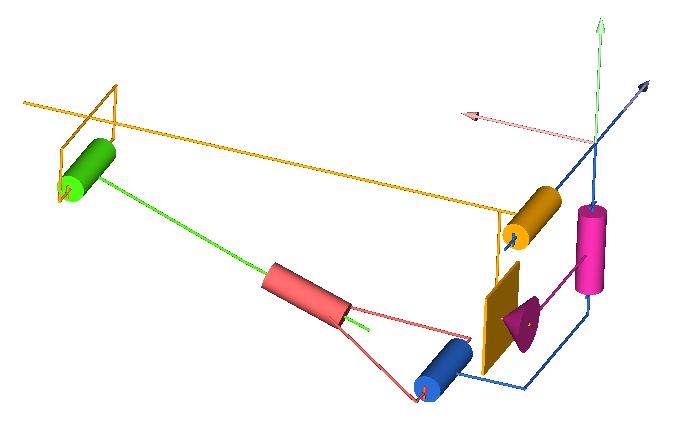
![]() Etape 1 - Avec Open mťca, dťclarer les 5 SEF suivants :
Etape 1 - Avec Open mťca, dťclarer les 5 SEF suivants :
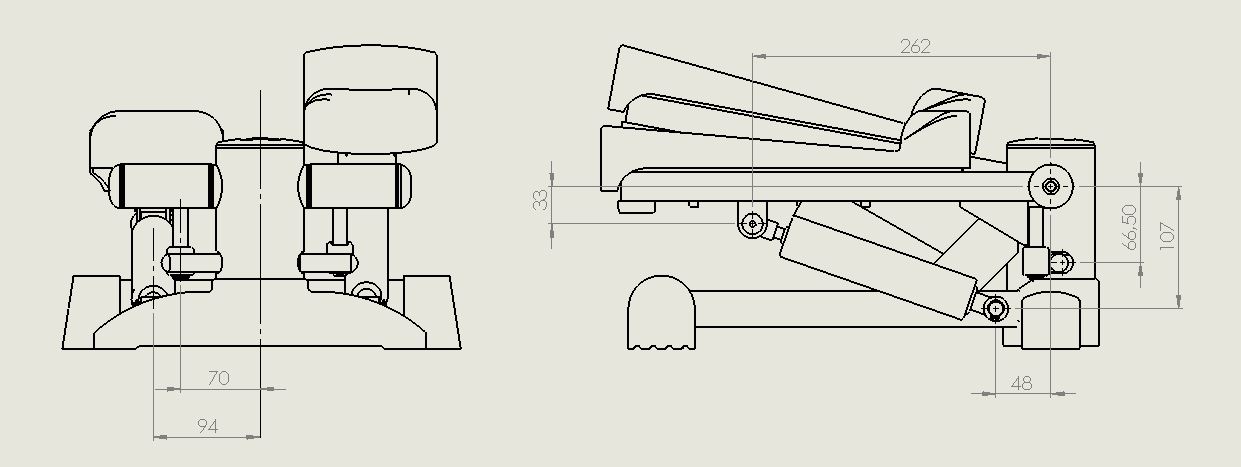
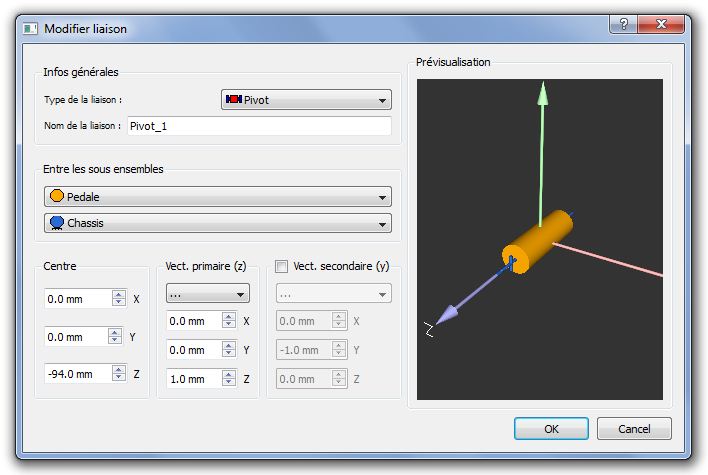
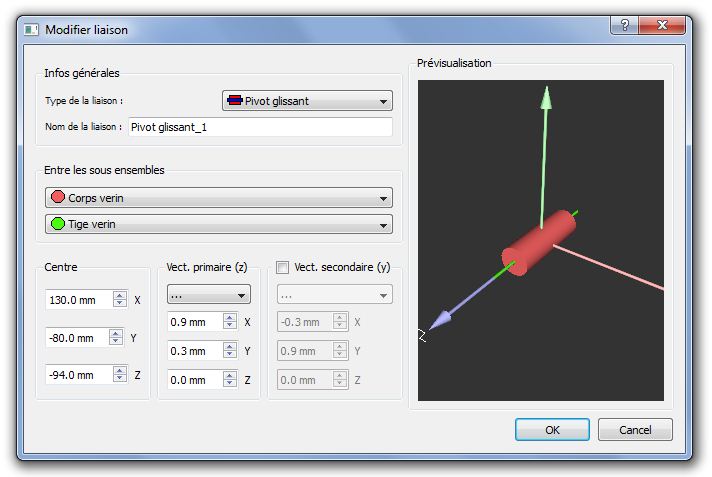
Etape 2 - A l'aide des dimensions donnťes ci-dessous, placer les 6 liaisons du shťma cinťmatique en choisissant la bonne orientation. Pour vous aider, 2 liaisons vous sont donnťes, vous devez trouver les caractťristiques des 4 autres en vous appuyant sur les prťcťdentes.
Rťgler l'ťchelle des liaisons ŗ 200% : ![]()
Etape 3 - Complťter le schťma cinťmatique avec les raccords ou les tiges nťcessaires entre les liaisons.
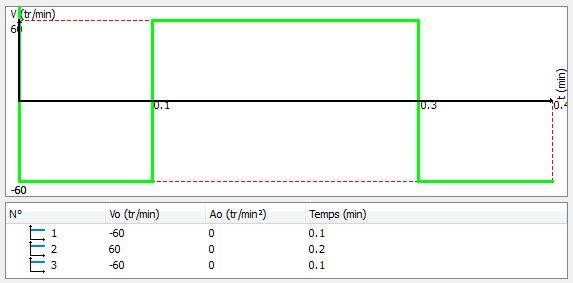
Etape 4 - Motoriser la liasion pivot entre le ch‚ssis et la pťdale avec un mouvement complexe :
Etape 5 - Pour les plus rapides - Par symťtrie, rťaliser l'autre partie du systŤme avec une nouvelle pťdale et un deuxiŤme vťrin.
![]() Placer votre fichier Open Meca nommer Stepper_Nom1_Nom2.omc dans le dossier de Restitution de devoirs et I2D_Stepper.
Placer votre fichier Open Meca nommer Stepper_Nom1_Nom2.omc dans le dossier de Restitution de devoirs et I2D_Stepper.