
Liaison 1 :
- X = 0
- Y = 0
- Z = 0
Liaison 2 :
- X = 50
- Y = 0
- Z = 0
Liaison 3 (vecteur primaire y):
- X = 50
- Y = -30
- Z = 0
Liaison 4 :
- X = 50
- Y = -60
- Z = 0
Liaison 5 :
- X = 50
- Y = -90
- Z = 0
Objectif : Réaliser le schéma cinématique de la transformation de mouvement avec le logiciel Open Méca.
Etape 1 - Création des sous ensembles :
Etape 2 - Création des liaisons :
Pour la position des liaisons, vous utiliserez les coordonnées suivantes :
|
|
Liaison 1 :
Liaison 2 :
Liaison 3 (vecteur primaire y):
Liaison 4 :
Liaison 5 :
|
Etape 3 - Compléter le schéma avec les tiges nécessaires et le symbole de la masse.
Etape 4 - Motorisation :
Pour simuler le mouvement alternatif du levier, nous allons piloter la liasion 1 avec un loi de mouvement complexe. Ajouter la motorisation ŕ la liaison 1, choississez Complexe puis Editer la loi de Mvt.
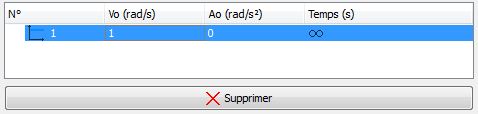
Sélectionner le mouvement 1 qui est par défaut et Supprimer.
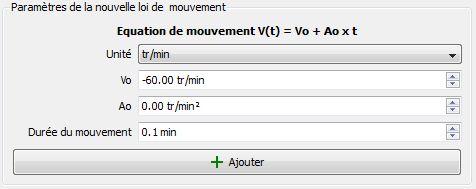
Compléter une premičre loi de mouvement comme ci-dessous puis Ajouter.
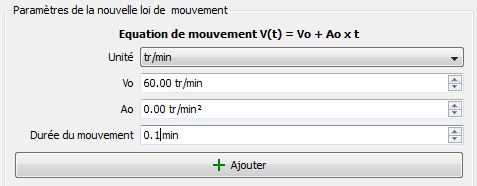
Compléter une deuxičme loi de mouvement comme ci-dessous puis Ajouter.
Votre graphique doit ressembler ŕ l'image ci-dessous :
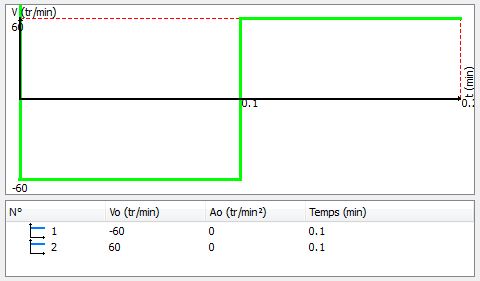
Ajouter 20 boucles pour répéter le mouvement puis cliquer sur OK.

Etape 5 - Lancer la simulation.