Orientation
|
Objectifs
|
Comprendre comment le drone s'oriente, dťterminer le couple moteur et proposer un modŤle de comportement.
|
|
Compťtences et savoirs ťvaluťs
|
- S2-3.3 - Comportement mťcanique des systŤmes : Equilibre des solides : modťlisation des liaisons, actions mťcaniques, principe fondamental de la statique, rťsolution d'un problŤme de statique plane.
- S2-3.1 - ModŤle de comportement : Principes gťnťraux d'utilisation, identification et limites des modŤles de comportements, paramťtrage associť aux progiciels de simulation.
|
|
Compte rendu
|
Compte rendu papier ŗ imprimer :  . .
|
|

|
1h50
|
La fonction de pilotage automatique du drone facilite le dťcollage et líatterrissage. AprŤs le dťcollage, le pilote automatique stabilise le quadricoptŤre ŗ 50 centimŤtres du sol.
Lorsque líutilisateur enlŤve ses doigts de líťcran de la station au sol, le pilote automatique met le drone en vol stationnaire.
Le pilote automatique prend ťgalement les commandes si la connexion Wi-Fi est perdue. Il stabilise le drone avant de le faire atterrir en douceur.
1 - Couple moteur
= 80 min
ModŤle proposť
|
HypothŤses :
- Les liaisons sont parfaites,
-
Les poids sont nťgligťs,
-
Le croisillon 1 est considťrť fixe.
Notation :
- Rayon du pignon moteur notť rp
- Rayon de la roue hťlice notť rh.
|

|
|
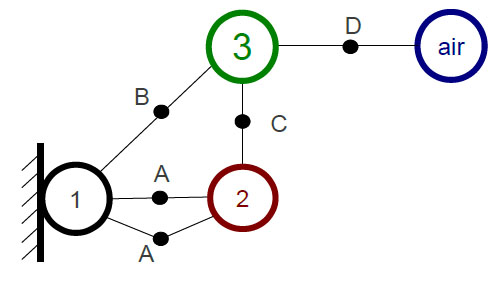
Graphe de liaison :
|
Bilan des actions mťcaniques :

|
|
Schťma cinťmatique :

|
1.1 - Mise en ťvidence du moment Ma/h
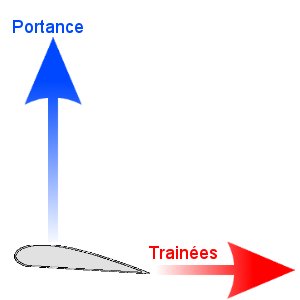
La sustentation du drone est obtenu gr‚ce ŗ l'action de l'air sur les hťlices avec le phťnomŤne de portance. En observant le torseur Ta/3 on remarque la prťsence d'un moment au point D, vous allez determiner l'intensitť de ce moment.
L'action de l'air sur l'hťlice est dťcomposťe en deux composantes : la portance Rz et la trainťe Rx.
|
Cas gťnťral
|
Cas du drone

|
Dans la premiŤre activitť, nous avions dťterminť une force Fh nťcessaire pour la sustentation de 1,1 N par hťlice soit un effort de portance Rz de 0,55N sur une pale de l'hťlice.
 Question 1.1 - Sachant que la rťsultante de l'action de l'air sur l'hťlice est inclinťe ŗ 25į par rapport ŗ l'axe Z, calculer fonction de Rz la trainťe Rx.
Question 1.1 - Sachant que la rťsultante de l'action de l'air sur l'hťlice est inclinťe ŗ 25į par rapport ŗ l'axe Z, calculer fonction de Rz la trainťe Rx.
Question 1.2 - Dťterminer littťralement puis calculer le moment de la traÓnťe Rx au point D. Le point d'application de Rx se situe au milieu du profil de la pale, mesurer la longueur de l'hťlice pour dťterminer r.
Question 1.3 - En tenant compte de la symťtrie des pales, calculer l'intensitť totale du moment Ma/3 en D.
Question 1.4 - Reprťsenter, sur la figure 1 du DR1, le sens de rotation de l'hťlice et le sens de rotation que le moment Ma/3 engendre. Que constatez-vous ?
Question 1.5 - Expliquer pourquoi les efforts de trainťe n'apparaissent pas dans l'expression du tosreur Ta/3 (coordonnťe en x nulle).
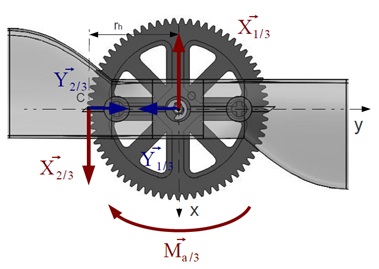
1.2 - Dťtermination de X2/3
Pour la suite la suite de l'ťtude on se place dans le plan (O, x, y) de l'engrenage. O ťtant le centre de la roue dentťe. Les torseurs en B et D sont reportťs en O.
Quelque soit votre rťsultat prťcťdent, vous prendrez la valeur donnťe en N.mm pour le moment Ma/3.

Question 1.6 - La roue dentťe (38) possŤde 69 dents d'un module de 0,5. Calculer le rayon rh de la roue dentťe.
Question 1.7 - Ecrire le torseur T2/3 au point O.
Question 1.8 - Appliquer le Principe Fondamental de la Statique analytiquement et ťcrire l'ťquation des moments en z : ΣNO = 0.
Question 1.9 - A partir de cette ťquation dťterminer X2/3.
1.3 - Couple moteur
Question 1.10 - Sachant que le pignon moteur (45) possŤde 8 dents, calculer le rayon rp du pignon moteur.
Question 1.11 - A partir de la composante X2/3 calculťe Question 1.9, dťterminer le couple moteur.
2 - ModŤle de comportement
= 30 min
 Vous pouvez manipuler le drone en faisant varier les vitesses des 4 moteurs ŗ l'aide des potentiomŤtres sur la base. A l'aide de vos observations pendant la manipulation, vous allez complťter le modŤle associť aux actions mťcaniques.
Vous pouvez manipuler le drone en faisant varier les vitesses des 4 moteurs ŗ l'aide des potentiomŤtres sur la base. A l'aide de vos observations pendant la manipulation, vous allez complťter le modŤle associť aux actions mťcaniques.
Question 2.1 - Complťter la figure 1 sur le DR2 en indiquant en bleu les sens de rotation des 4 hťlices et la valeur de Nh de 1733 tr/min pour un vol stationnaire.
Question 2.2 - Complťter la figure 1 en traÁant en rouge les moments de l'air sur chaque
hťlice Mh1, Mh2 , Mh3 , Mh4.
Vous allez adapter le modŤle prťcťdent ŗ une autre situation de pilotage.
Question 2.3 - Complťter la figure 2 en indiquant les sens de rotation des 4 hťlices et la valeur de Nh en tr/min pour une modťlisation correspondant ŗ la configuration oý on souhaite tourner dans le sens horaire suivant l'axe vertical. Ajouter en rouge les moments de chaque
hťlice Mh1, Mh2 , Mh3 , Mh4.
Question 2.4 - Complťter la figure 3 en indiquant les sens de rotation des 4 hťlices et la valeur de Nh en tr/min pour une modťlisation correspondant ŗ la configuration oý on souhaite tourner dans le sens antihoraire suivant l'axe vertical. Ajouter en rouge les moments de chaque
hťlice Mh1, Mh2 , Mh3 , Mh4.