Objectif : Comprendre comment le drone s'oriente, déterminer le couple moteur et proposer un modčle de comportement.
Imprimer les documents réponses en recto-verso.
![]()
![]() = 70 min
= 70 min
Modčle proposé
|
Hypothčses :
Données :
|
|
|
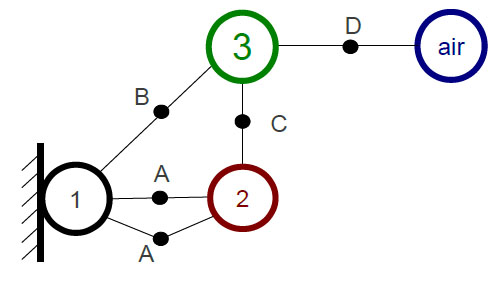
Graphe de liaison :
|
Bilan des actions mécaniques :
|
|
Schéma cinématique :
|
|
1.1 - Mise en évidence de Fh et Ma/h
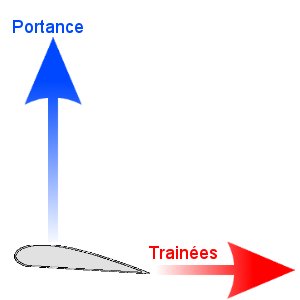
La sustentation du drone est obtenu grâce ŕ l'action de l'air sur les hélices avec le phénomčne de portance. En observant le toreur Ta/3 on remarque la présence d'un moment au point D.
l’hélicoptčre vole en remplaçant les ailes fixes d’un aéroplane "normal " par une voilure tournante. Avec le modčle simplifié ci-dessous vous allez mettre en évidence l'existence du moment résultant Ma/3.
Question 1.1 - Représenter, sur la figure 1 du DR1, en M la portance, la traînée, leur résultante (vecteur somme des deux).
|
Cas général
|
Cas du drone
|
Question 1.2 - Déterminer littéralement le moment de la traînée en D.
Question 1.3 - Exprimer littéralement la relation entre Fh (ou Fa/3) et Ma/3 en D pour toute l'hélice en tenant compte de la symétrie des pales.
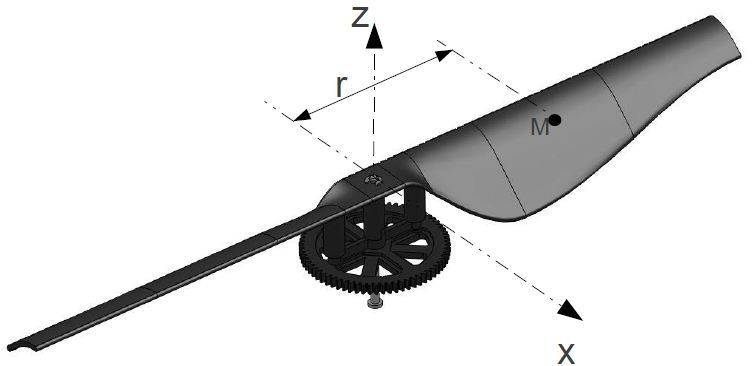
Question 1.4 - Sachant que le point M se situe environ au milieu du profil de la pale, mesurer et déterminer le moment Ma/3 pour un vol stationnaire (vous vous servirez de vos résultats de l'étude sur la Sustentation).
Question 1.5 - Représenter, sur la figure 2 du DR1, le modčle simplifié de l'action de l'air sur l'hélice sous forme de résultantes.
1.2 - Détermination de Z1/3
Question 1.6 - A partir des coordonnées issues du Bilan des actions mécaniques de la partie Modčle proposé, isoler l'hélice 3 et faire le bilan analytique des actions mécaniques.
Question 1.7 - Appliquer le Principe Fondamental de la Statique analytiquement avec les équations des forces :
ΣFext = 0 soit ΣX = 0, ΣY = 0 et ΣZ = 0
Question 1.8 - A partir de l'équation des forces sur z déterminer Z1/3.
1.3 - Détermination de X2/3
Question 1.9 - A partir des coordonnées issues du Bilan des actions mécaniques de la partie Modčle proposé, représenter sur la vue de dessus, sur le DR2, les actions mécaniques s'exerçant sur l'hélice 3 dans le plan (x,y) en tenant compte du sens de rotation de l'hélice.
Question 1.10 - En utilisant le produit vectoriel, déterminer littéralement les coordonnées du moment M2/3 en B.
Question 1.11 - Appliquer le Principe Fondamental de la Statique analytiquement avec les équations des moments :
ΣMBext = 0 soit ΣLB = 0, ΣMB = 0 et ΣNB = 0
Question 1.12 - Mesurer au pied ŕ coulisse sur le drone le rayon rh.
Question 1.13 - A partir de l'équation des moments sur z déterminer X2/3.
1.4 - Couple moteur
Question 1.14 - Mesurer au pied ŕ coulisse sur le drone le rayon rm.
Question 1.15 - A partir de la composante X2/3 calculée Question 1.13, déterminer le couple moteur.
![]() = 20 min
= 20 min
A l'aide de vos observations pendant la manipulation, vous allez compléter le modčle associé aux actions mécaniques.
Question 2.1 - Compléter la figure 1 sur le DR3 en indiquant en bleu les sens de rotation des 4 hélices et la valeur de Nh en tr/min pour un vol stationnaire.
Question 2.2 - Sachant que le moment Ma/h engendré est contraire au sens de rotation des hélices, compléter la figure 1 en traçant en rouge les moments de chaque hélice Mh1, Mh2 , Mh3 , Mh4.
Vous allez adapter le modčle précédent ŕ une autre situation de pilotage.
Question 2.3 - Compléter la figure 2 en indiquant les sens de rotation des 4 hélices et la valeur de Nh en tr/min pour une modélisation correspondant ŕ la configuration oů on souhaite tourner dans le sens horaire suivant l'axe vertical.. Ajouter en rouge les moments de chaque hélice Mh1, Mh2 , Mh3 , Mh4.
Question 2.4 - Compléter la figure 3 en indiquant les sens de rotation des 4 hélices et la valeur de Nh en tr/min pour une modélisation correspondant ŕ la configuration oů on souhaite tourner dans le sens antihoraire suivant l'axe vertical. Ajouter en rouge les moments de chaque hélice Mh1, Mh2 , Mh3 , Mh4.