Maison BBC
Volet autonome
|
Objectifs
|
Etudier l'autonomie énergétique et la sécurité d'un volet autonome.
|
|
CI abordés
|
- CI 4.3 - Organisation fonctionnelle de la chaine d'énergie.
- CI 5.1 - Caractéristiques des informations.
- CI 7.3 - les systèmes de stockage de l'énergie.
|
|
Compte rendu
|
Informatique sous OpenOffice.
|
|

|
1h50
|
 Dans le cadre dun projet d'habitation label BBC, il est intéressant déquiper les fenêtres dun volet roulant qui permet de contrôler la luminosité, daccroître lisolation thermique et daugmenter le confort acoustique.
Dans le cadre dun projet d'habitation label BBC, il est intéressant déquiper les fenêtres dun volet roulant qui permet de contrôler la luminosité, daccroître lisolation thermique et daugmenter le confort acoustique.
Pour répondre à des exigences de confort dutilisation, de rénovation et de domotisation, certains modèles sont motorisés, pilotables à distance et autonomes en énergie (pas de passage de câbles électriques).
Ces évolutions techniques amènent à résoudre les problèmes suivants :
Létude porte sur les volets roulants solaires qui équiperont la maison dont les documents techniques en ressources vous présentant le système :
-
sous l'aspect fonctionnel,
-
sous l'aspect structurel,
-
sous l'aspect comportemental.
1 - Solutions technologiques permettant le déplacement du volet
= 10 min
Lobjectif de cette partie est didentifier les solutions techniques permettant le déplacement du volet.
Question 1 - A laide des documents techniques du volet autonome, identifier les solutions technologiques qui assurent les fonctions suivantes :
-
Stocker le volet,
-
Guider le volet,
-
Déplacer le volet,
-
Assurer une tension pour un enroulement correct,
-
Maintenir le volet en position lorsque le moteur nest pas alimenté.
2 - Economiser mécaniquement de l'énergie en réduisant le couple nécessaire
= 30 min
Lobjectif de cette partie est de mettre en évidence les bénéfices de la solution choisie avec réducteur pour réaliser ladaptation du couple demandé au moteur en comparaison avec une solution sans réducteur.
Afin de réaliser la comparaison des solutions avec et sans réducteur, on réalise une simulation à l'aide d'une modélisation comportementale des mécanismes de déplacement :

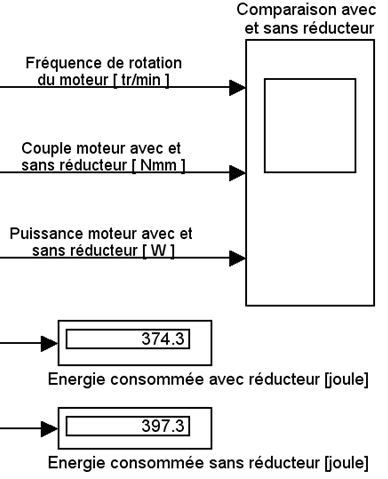
Les graphes suivants sont un relevé dans une configuration identique du modèle comportemental des solutions avec et sans réducteur dont les schémas cinématiques et les chaines dénergie sont décrits dans les documents techniques. Ils représentent un aller-retour du volet :
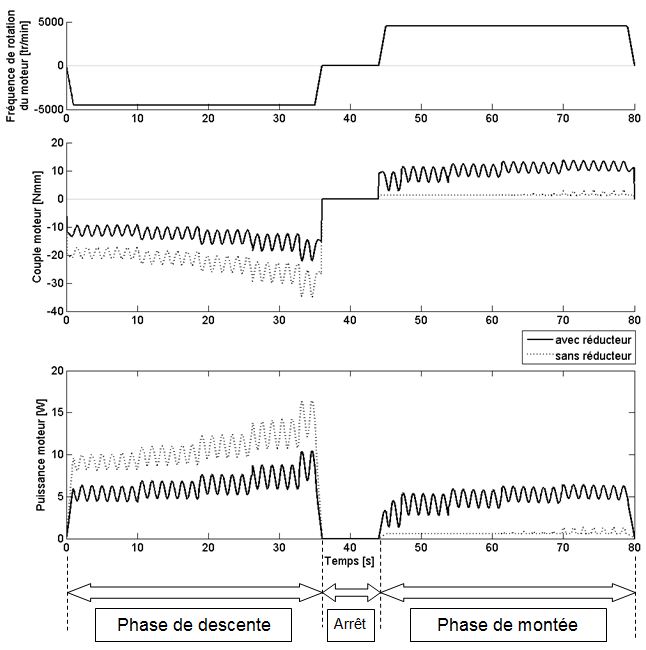
-
En phase de descente, pour les 2 solutions, la fréquence de rotation du moteur est négative ainsi que le couple moteur.
-
En phase de montée, pour les 2 solutions, la fréquence de rotation du moteur est positive ainsi que le couple moteur.
-
Il en résulte pour les 2 solutions que la puissance moteur est positive.
Question 2 - A laide de ces résultats, expliquer, au vu du signe de la puissance moteur pour les 2 solutions, si le couple moteur est un couple à fournir ou un couple reçu.
Question 3 - A partir de la chaine dénergie du mécanisme de déplacement réel, expliquer pourquoi, malgré la présence du ressort et des actions mécaniques quil impose dans les 2 solutions, le couple moteur est nul lors de larrêt.
Question 4 - Déterminer les couples maximums, en valeur absolue, sur le cycle pour les solutions avec et sans réducteur.
Question 5 - Evaluer en pourcentage la variation du couple de la solution "avec réducteur" par rapport à la solution "sans réducteur" selon la formule suivante :

Question 6 - Sachant que la solution avec réducteur réduit la consommation dénergie de 5,8% en comparaison de la solution sans réducteur et en fonction des résultats de la question précédente, conclure sur lintérêt de la mise en place de la solution "avec réducteur" en termes de couple et dénergie consommée.
3 - Comment assurer lautonomie du système
= 30 min
Lobjectif de cette partie est de sassurer que lexigence dautonomie globale du système soit bien satisfaite et de vérifier que le dimensionnement de chaque élément de la chaine dénergie est correct. A partir des données obtenues sur un cycle de descente du volet, la quantité délectricité nécessaire à un cycle complet montée/descente sera comparée à celle disponible dans la batterie.
Scénario retenu : 2 cycles sont nécessaires dans le cas dune automatisation du mécanisme, valeur que lon retiendra comme référence pour létude globale.
Etude énergétique
Le modèle comportemental, dans les conditions les plus défavorables nous donne le cycle nécessitant le plus de couple moteur. Le cycle de descente est le plus impactant.
On limitera alors létude à ce cycle de descente et on fera lhypothèse simplificatrice quun cycle de montée/descente est parfaitement symétrique (cas le plus défavorable).
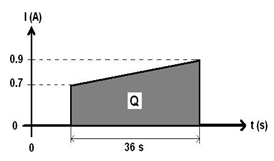 Pour cette étude on utilisera le modèle ci-contre :
-
Pour cette étude on utilisera le modèle ci-contre :
-
-
le courant I en Ampères correspond au courant consommé par le moteur lors dune descente seulement. Pour un moteur à courant continu, le couple étant proportionnel au courant, cette courbe représente une simplification de celles obtenues précédemment.
-
Les valeurs de courant affichées sont les valeurs réelles mesurées.
On considère dans cette partie que la batterie peut être rechargée quelle que soit la consommation journalière du système. On prendra pour la suite de létude une valeur arrondie de Qtot de 20 mAh.
Question 7 - Daprès les caractéristiques de la batterie, données dans la Description SysML de la chaine d'énergie, et de la valeur de Qtot, calculer le nombre de cycle de montée/descente que lon pourrait effectuer en considérant une décharge totale de celle-ci. Conclure quant au dimensionnement de la batterie au regard de ce seul critère et du scénario retenu.
Etude de la charge de la batterie
Au niveau du panneau photovoltaïque, de technologie amorphe (rendement de 5 à 7%) et de superficie 0.017 m², nous pouvons déduire des données dirradiations journalières ainsi que des horaires densoleillement sur la région de Chinon dans le tableau suivant.
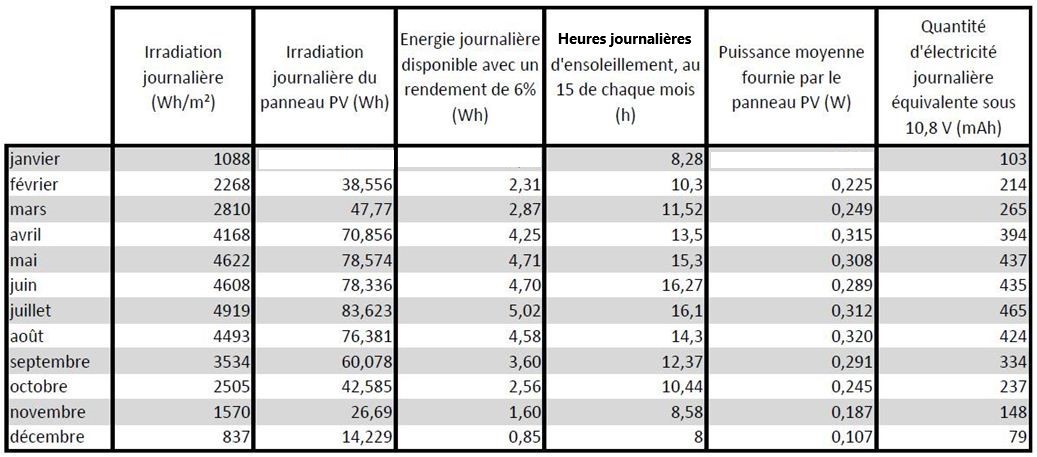
Question 8 - A laide du tableau, calculer le nombre de cycles de montée/descente journalier que peut assurer le panneau photovoltaïque dans le cas le plus défavorable (en termes de quantité délectricité équivalente à ce que devrait fournir la batterie). En comparant ce nombre au scénario retenu, conclure quant au dimensionnement du panneau photovoltaïque.
Question 9 - En fonction de la puissance maximale nécessaire, que vous relèverez sur les courbes utilisées précédemment, et de ce tableau, expliquer pourquoi il est nécessaire de coupler le panneau photovoltaïque à un élément de stockage dénergie (raisonner en termes de puissance).
4 - Comment assurer la protection du système : Détection des blocages
= 40 min
Lobjectif de cette partie est détudier le comportement du système dans la situation de dysfonctionnement la plus probable et la plus dégradante : un blocage du volet en pleine course. A laide de la chaine dinformation, on vérifiera que le système permet de détecter une telle situation et déviter tous risques dendommagements mécaniques et électriques éventuels.
Obtention de linformation de position du volet
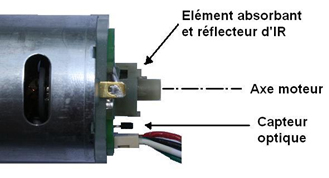
Lélément dacquisition est un émetteur/récepteur infrarouge (IR) fixé en vis-à-vis dun élément tournant sur laxe moteur. Cet élément permet dalternativement absorber ou réfléchir londe IR, permettant dobtenir un signal binaire variable.
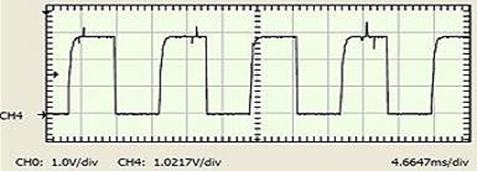
Le chronogramme ci-dessus correspond au signal obtenu en sortie du capteur en conditions normales de déplacement du volet.
Question 10 - A laide de ce chronogramme, déterminer la période moyenne du signal obtenu en ms (être le plus précis possible, arrondir au 1/10ème).
Question 11 - Sachant que le moteur tourne à une vitesse moyenne de 5000 tr/min, calculer la durée dun tour du moteur. En déduire à combien de tour du moteur correspond une période de ce signal (donner une valeur entière).
Linformation de nombre de tours moteur, doù découle linformation POS_VOL (voir les diagrammes d'états), est obtenue par comptage/décomptage (respectivement lors dune descente/montée) du nombre dimpulsions de CAPT_OPT. Mais quel que soit le sens de rotation, le signal obtenu est invariablement le même.
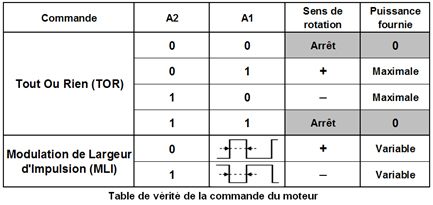
Question 12 - A laide du diagramme de blocs internes et de la table de vérité ci-dessous, expliquer comment le microcontrôleur peut distinguer le sens de rotation.
Etude du comportement du système dans une situation de blocage
Le document technique Blocage du sytème représente les relevés de mesure du moteur (courant dinduit et tension dalimentation) ainsi que le signal de sortie du capteur obtenus lors dun blocage inopiné. Le document technique Description SysML représente les diagrammes détats/transitions permettant dobtenir un tel chronogramme.
Question 13 - Durant la phase 2, identifier à quoi est due laugmentation de courant dinduit.
Question 14 - A laide des documents technique Blocage du sytème et des diagrammes d'états, Identifier à quel état du diagramme détats/transitions correspond La phase 3. De même, Expliquer, par une phrase, de quelle manière seffectue la transition entre la phase 4 et la phase 5.