On peut classer les rÚducteurs en deux grandes familles :
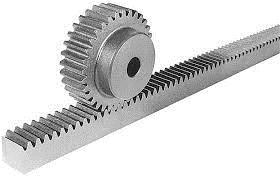
- Les rÚducteurs utilisant une transmission par obstacle : engrenage, poulie / courroie crantÚe, pignon/chaine.
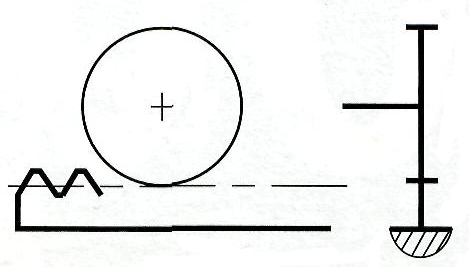
- Les rÚducteurs utilisant une transmission par adhÚrence : roue de friction, poulie/courroie.
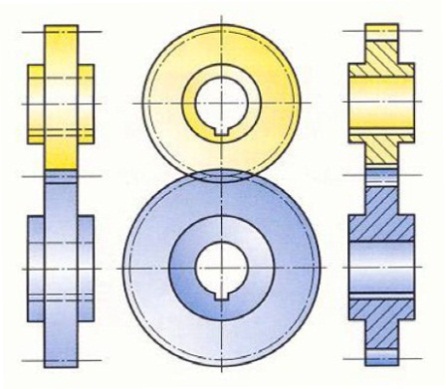
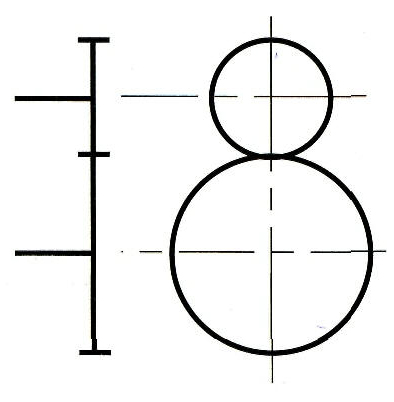
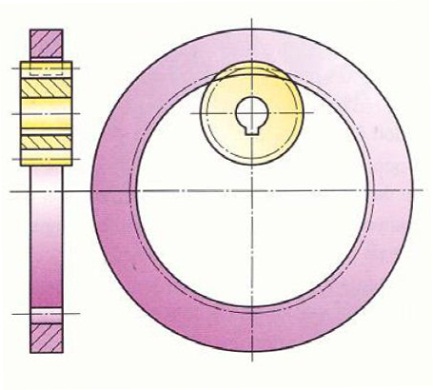
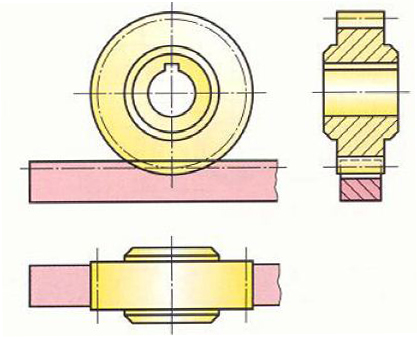
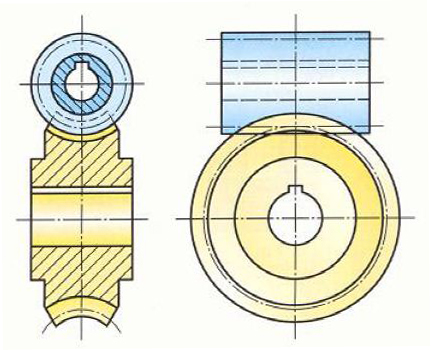
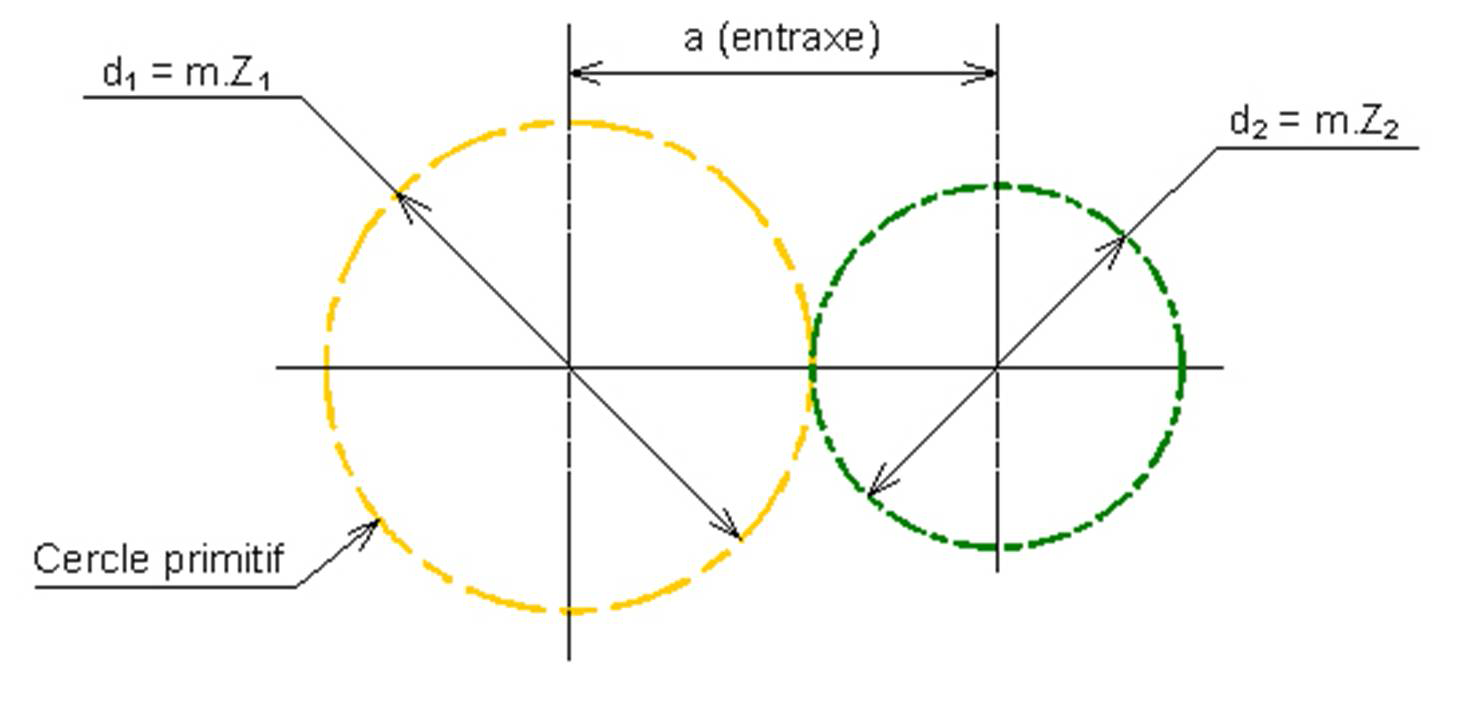
Les engrenages cylindriques (ou parallÞles) Ó dentures droites sont les plus courants. Ils permettent la transmission du mouvement de rotation entre arbres parallÞles.
|
|
|
|
|
Les dentures droites sont employÚes dans les petits appareils et avec les engrenages intÚrieurs. Solution simple et Úconomique. |
Les dentures hÚlico´dales, plus silencieuses, sont plus utilisÚes lorsquÆil sÆagit de transmettre de la puissance. |
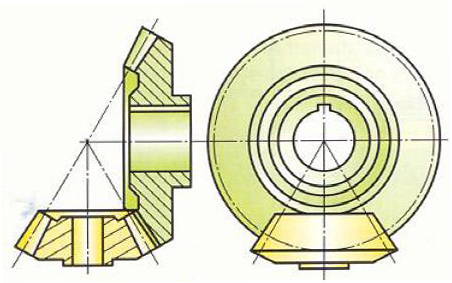
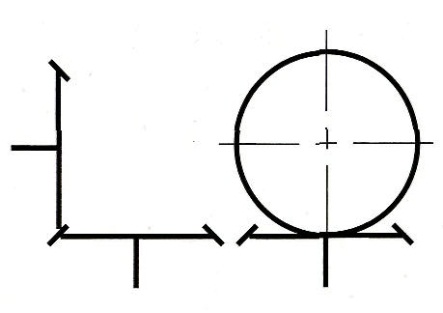
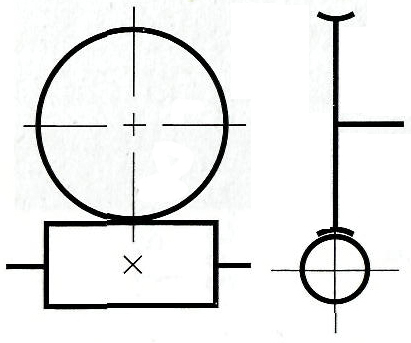
Les engrenages coniques (ou concourants) permettent la transmission du mouvement de rotation entre arbres non parallÞles. |